The Research of Stance-Phase Detection to Improve ZUPT-Aided Pedestrian Navigation System
 asymptotic ZUPT
asymptotic ZUPT
Background
In the GPS-denied environment, inertial navigation system is the justifiable and general solution because it do not require installation of infrastructure beforehand. Nevertheless, the inertial navigation system (INS) calculates the relative displacement of an object that will result in accumulated errors due to the sensors’ drift. Under the assumption that the velocity is zero when foot is on the ground, ZUPT-aided INS modify the positioning error leveraging this pseudo-measurement.
Contribution
This paper improve the ZUPT-aided INS in two aspects: 1) By considering the zero velocity detecion as a hypothesis-testing problem, we propose a new test statistic; 2) To avoid excessive modification of heading angle (yaw), an asymptotic ZUPT is devised.
- Accurate zero velocity detection: This paper takes the difference value of gyroscope as the test statistic, which makes the wave more sharper. The proposed method enable zero velocity detecion to maintain its accuracy in high-dynamic motion.
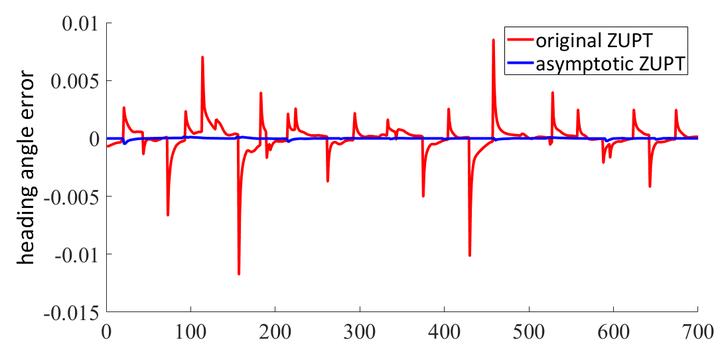
- Stable attitude modification: The heading angle, with zero velocity update, is prone to deviation, because the excessive yaw error estimation by KF at the initial update. Therefore, the attenuation factor is applied to the pseudo-measurement, which alleviates the yaw fluctuation after update.