Visual Inertial Map Matching for Indoor Positioning using Architectural Constraints
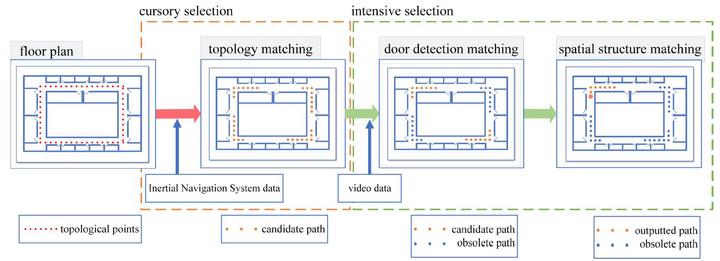 The process of selecting real trail of pedestrian from topological points of 2D plane
The process of selecting real trail of pedestrian from topological points of 2D plane
Background
For the self-contained navigation systems, the accurate initial position, as the prior knowledge, is crucial for real-world task. Whereas, most existing systems rely on the external signals to achieve initialization, which is contrary to the original intention of positioning whithout pre-installed infrastructure.
Contribution
The proposed algorithm requires 2D plane map, foot-mounted inertial data, hand-held shot images, realizing a real self-contained navigation system. From the topological points in the maps, the trajectory of pedestrian can be selected via three steps: 1) cursory selection by ZUPT-aided INS generates several candidate paths; 2) door detection and matching excludes some trails further; 3) the final result is decided by a Siamese Network matching the spatial structure.