Symmetrical-Net: Adaptive Zero Velocity Detection for ZUPT-Aided Pedestrian Navigation System
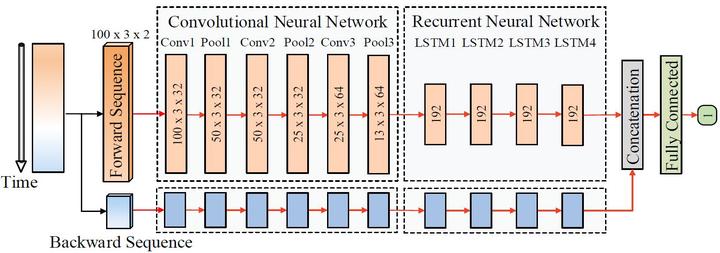 Architecture of Symmetrical-Net
Architecture of Symmetrical-Net
Background
Zero velocity detection selects the phase that foot is anchored to the ground from the whole gait of pedestrian. As the vital part of zero velocity update (ZUPT), it triggers the error-state Kalman Filter (ESKF) to modify the position estimated by pedestrian dead reckoning (PDR).
Contribution
The characteristics of proposed Symmetrical-Net, as an adaptive zero velocity detector, contain: 1) leveraging RCNNs extracts the features from waveform image of inertial data, and derives connections among consecutive sampling points; 2) Two identical RCNNs branches are assembled in a symmetrical shape, analysing the raw IMU readings berfore and after the undetermined time instant. The contributions can be summarized into:
- Robust and adaptive zero velocity detection: Compared with the fixed threshold detector, the proposed Symmetrical-Net can adaptively calculate the probability of being stationary, conserving the manual labour to fine tune the threshold. It also outperforms other competing adaptive detectors, which is attributed to considering contextual information and extended observation scope.
- Accurate and robust pedestrian tracking: Performance of Symmetrical-Net makes a profound impact on the trajectory reconstruction of the ZUPT-aided INS system. Extensive experiments reveals that the navigation system, assisted with proposed detector, maintains high-accuracy positioning under various individuals in three motion (walking, fast walking, and running).