LightVO: Lightweight Inertial-Assisted Monocular Visual Odometry with Dense Neural Networks
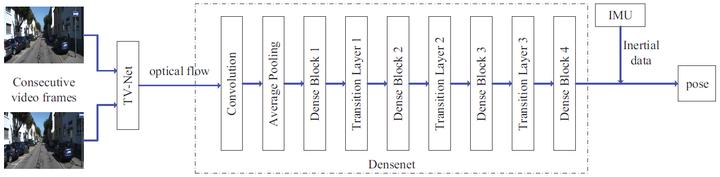 Architecture of LightVO with inertial-assisted
Architecture of LightVO with inertial-assisted
Background
Visual Odometry (VO), conducts the ego-motion estimation using on-board camera. In this paper, a learning-based monocular VO is proposed. What’s more, with the IMU correction through loose-coupled mechanism, a visual-inertial odometry improves the accuracy of pose estimation further.
Contribution
The input of the proposed VO is optical flow extracted by TVNet, and the structure of the learning-based VO is inspired by the DenseNet that is lightweight and effective neural network mainly applied to CV feilds. Utilizing the KF, the inertial positioning is merged into the navigation scheme. The contributions can be summarized into:
- Lightweight and accurate visual odometry: Both parameters amount and average execution time of the proposed VO is lighter than competing approach. In addation, the proposed VO outperforms other VO in translation estimation.
- Loose-coupled visual-inertial odometry: The well devisd data fusion algorithm considers the accumulated error of INS. Therefore, the penalty for translation estimation by INS is set, which avoids excessive correction. Compared with the proposed visual odometry, the visual-inertial decreases the translation and rotation error by up to 70% and 73%, respectively.